







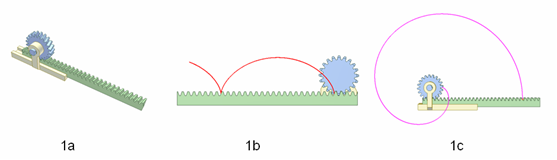





Hầu hết các bánh xe omni đều dựa trên cùng một nguyên lý :trong khi bánh xe cung cấp một lực kéo theo hướng bình thường trên trục của động cơ, nó có thể trượt không ma sát theo hướng trục của động cơ. Để đạt được điều này, bánh xe được chế tạo bằng cách thêm các bánh xe nhỏ dọc theo chu vi của bánh chính. Mỗi bánh xe đều có thể di chuyển robot, nhưng do bánh xe được đặt trên chu vi của robot nên nó sẽ làm quay khung robot. Để tìm ra mối quan hệ giữa moment động cơ và sự dịch chuyển của robot
Thông tin chi tiết
- Tên file:
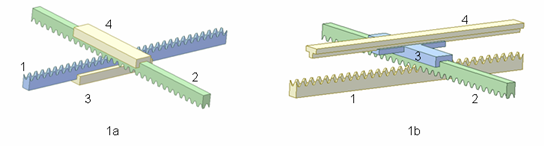
- Tài liệu so sánh giữa robot Omni 3 bánh và robot Omni 4 bánh tương đối đầy đủ
- Phiên bản:
- N/A
- Tác giả:
- N/A
- Website hỗ trợ:
- N/A
- Thuộc chủ đề:
- Danh Mục » Ngành cơ điện tử » Thiết kế hệ thống cơ điện tử
- Gửi lên:
- 04/09/2013 20:13
- Cập nhật:
- 04/09/2013 20:13
- Người gửi:
- haihoang_boy
- Thông tin bản quyền:
- N/A
- Dung lượng:
- N/A
- Đã xem:
- 2120
- Đã tải về:
-
3
- Đã thảo luận:
- 0
Tải về
Để tải về, bạn cần đăng nhập với tư cách thành viên của site. Nếu chưa có tài khoản, bạn có thể đăng ký bằng cách click vào đây
Đánh giá
Tài Liệu Mới Nhất
- Hệ Thống Máy Và Thiết Bị Lạnh - Pgs.Ts.Đinh Văn Thuận & Võ Chí Chính, 456 Trang
07.10.2016 09:10 - Giáo trình cảm biến công nghiệp - ĐHBK Đà Nẵng
27.09.2016 09:01 - Download phần mềm triển khai hình gò
26.08.2016 12:09 - Download Autocad 2017 Full Key Crack + Keygen + Hướng dẫn cài đặt
25.08.2016 09:50 - [Tài liệu] Vibration chart: Bảng tra các đồ thị rung động dạng phổ
20.08.2016 08:53 - [Tài liệu] Tìm hiểu đồ gá trên máy CNC - ĐHGTVT
18.08.2016 08:40 - [Tài liệu] Tổng quan về máy CNC và lập trình CNC cho máy phay, máy tiện
18.08.2016 08:25 - Giáo trình Maintenance Engineering Handbook
16.08.2016 08:43 - Strategic Six Sigma - Best Practices from the Executive Suite
15.08.2016 04:54 - Handbook On Green Productivity
15.08.2016 04:49
Text Link
Cửa hàng bán giường inox Nội Thất Đại Thành | Mẫu giường sắt tại Đại Thành | Bán giường inox Đại Thành | Nơi bán giường sắt 1m2 | Bán giường gấp, giường sắt | Cửa hàng bàn inox chữ nhật | Bán ghế inox | Mua võng xếp | Mua bán tủ sắt | Xem bàn inox 304 | Công ty sửa chữa biến tần NamVietAutomation | Dịch vụ sửa biến tần ABB tại NamVietAutomation | Dịch vụ sửa biến tần Siemens tại HCM | Dịch vụ sửa biến tần Keb tại HCM | Dịch vụ sửa biến tần Keb tại HCM | Dịch vụ sửa chữa biến tần tại TPHCM | Cơ sở giường gấp xếp tại TPHCM