












The rotational inverted pendulum system is a well-known test platform for evaluating various control algorithms. Also, it has some significant real-life applications such as position control, aerospace vehicles control, and robotics [12, 13]. The system consists of a rotational arm and a pendulum where the rotational arm is actuated by a motor with the objective of balancing the pendulum in the inverted position. A schematic diagram of the RIP system is represented in Figure 1, where u, lp, mp, α, r, θ, andJb are the motor input, the pendulum length, the pendulum mass, the pendulum angle, the arm length, the arm angle and effective mass moment of inertia, respectively.

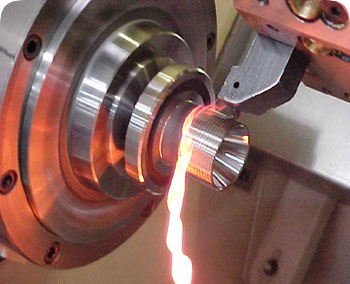
The plane of the pendulum is orthogonal to the radial arm. Figure 2 indicates the RIP system built in robotics research lab in our department. Also, the block diagram of the whole system is shown in Figure3.


In this section, the dynamic equations of the RIP system considering backlash and friction effects are presented. The RIP dynamics are governed by [12, 14]
The above nonlinear model can be found in the following equations:
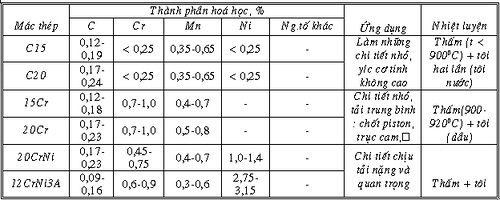
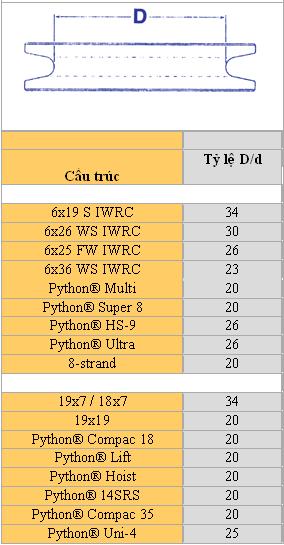
The parameters of nonlinear model of the system are represented in Table 1.

Using (2.1)–(2.3), the RIP system is easily simulated using Simulink and Matlab. The Simulink block diagram of RIP system shown in Figures 4 and 5 illustrates the step response without controllers indicating the whole system is unstable. The controller parameters generated by heuristic algorithms are employed iteratively in relevant simulation blocks, and the cost function is calculated in the manner presented in the next section.


3. GA, PSO, and ACO: An Overview
In the following, brief reviews of GA, PSO and ACO principle are illustrated.
3.1. GA
Considering Darwin's original ideas, life in all its diverse forms is evolved by natural selection and adaptation processes controlled by the survivability of the fittest species. GA is an evolutionary optimizer that takes a sample of possible individuals and employs selection, crossover, and mutation as the primary operators for optimization [15, 16].
3.2. PSO
Considering the social behavior of swarm of fish, bees, and other animals, the concept of the particle swarm optimization (PSO) is developed. The PSO is a robust stochastic evolutionary computation method based on the movement of swarms looking for the most fertile feeding location [16].
From the above statements, it is obvious that the theoretical bases of the two optimization methods rest upon two completely different structures. The GA is based on genetic encoding and natural selection, and the PSO method is based on social swarm behavior. PSO is based on the principle that all solutions can be represented as particles in a swarm. Each particle has a position and velocity vector, and each position coordinate represents a parameter value. Similar to GA, PSO requires a fitness evaluation function that takes the particle’s position and assigns a fitness value to it. and are the personal best () position and global best () position of the ith particle. Each particle is initialized with a random position and velocity. The velocity of each particle is accelerated toward the global best and its own personal best based on the following equation:
Here rand() and Rand() are two random numbers in the range [], and are the acceleration constants, and is the inertia weight factor. The parameter helps the particles converge to , rather than oscillating around it. Suitable selection of provides a balance between global and local explorations. In general, w is set according to the following equation [16, 17]:
The positions are updated based on their movement over a discrete time interval () as follows, with usually set to 1:
Then the fitness at each position is reevaluated. If any fitness is greater than , then the new position becomes and the particles are accelerated toward that point. If the particle’s fitness value is greater than , then is replaced by the current position.
3.3. ACO
ACO is a relatively recent approach to solve optimization problems by simulating the behavior of ant colonies and modeling the behavior of ants, which are known to be able to find the shortest path from their nest to a food source [18]. ACO is an optimization technique that has been recently developed and recognized as effective for combinatorial optimization problems.
All ants start their tours from source node and end up their tours in destination node. In each node, an ant chooses its path probabilistically, and the probability of choosing an edge is proportional to the pheromone on the edge, that is, roulette wheel selection.
All edges have an initial amount of pheromone, . After completion of all tours, first pheromone values on all edges are lowered, reflecting evaporation:where is the pheromone evaporation rate. Then all ants deposit pheromone on all edges they have crossed in their tours:where is the tour of the th ant, is its cost, and is a positive constant which allows to adjust maximum pheromone deposit.
The algorithms parameters have been chosen based on trial and error as follows. For GA method, population size = 50, crossover rate = 0.5, mutation rate = 0.01, and maximum generations = 20; for PSO algorithm, number of particles = 50; acceleration constants , and maximum iteration = 20; for ACO algorithm, , , and . Each algorithm is implemented in Matlab. All of the programs are run on a 2.1 GHz Core 2 Duo processor with 2 GB of memory. Each of the optimization methods is tested in 50 independent runs involving 50 different initial trial solutions.
- Tên file:
- ROTATIONAL INVERTED PENDULUM
- Phiên bản:
- N/A
- Tác giả:
- N/A
- Website hỗ trợ:
- N/A
- Thuộc chủ đề:
- Danh Mục » Ngành cơ điện tử » Động lực học và điều khiển
- Gửi lên:
- 11/08/2013 06:32
- Cập nhật:
- 11/08/2013 06:32
- Người gửi:
- haihoang_boy
- Thông tin bản quyền:
- N/A
- Dung lượng:
- N/A
- Đã xem:
- 1585
- Đã tải về:
-
0
- Đã thảo luận:
- 0
Tài Liệu Mới Nhất
- Hệ Thống Máy Và Thiết Bị Lạnh - Pgs.Ts.Đinh Văn Thuận & Võ Chí Chính, 456 Trang
07.10.2016 09:10 - Giáo trình cảm biến công nghiệp - ĐHBK Đà Nẵng
27.09.2016 09:01 - Download phần mềm triển khai hình gò
26.08.2016 12:09 - Download Autocad 2017 Full Key Crack + Keygen + Hướng dẫn cài đặt
25.08.2016 09:50 - [Tài liệu] Vibration chart: Bảng tra các đồ thị rung động dạng phổ
20.08.2016 08:53 - [Tài liệu] Tìm hiểu đồ gá trên máy CNC - ĐHGTVT
18.08.2016 08:40 - [Tài liệu] Tổng quan về máy CNC và lập trình CNC cho máy phay, máy tiện
18.08.2016 08:25 - Giáo trình Maintenance Engineering Handbook
16.08.2016 08:43 - Strategic Six Sigma - Best Practices from the Executive Suite
15.08.2016 04:54 - Handbook On Green Productivity
15.08.2016 04:49